Technical Library
What is a Bistable Rotary Solenoid?
A Technical Overview
What is a Bistable Rotary Solenoid? The Definitive Technical Overview
The bistable rotary solenoid changes state with the application of a momentary pulse of electricity, and then remains in the changed state without power applied until a further pulse of reverse polarity is applied to drive it in the opposite direction. Because energy is only applied in short pulses, high power can be applied to develop high torque for fast operation without leading to heating problems. Response time of <<10ms is possible for some of these devices.
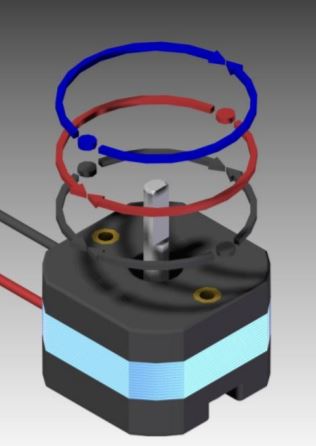
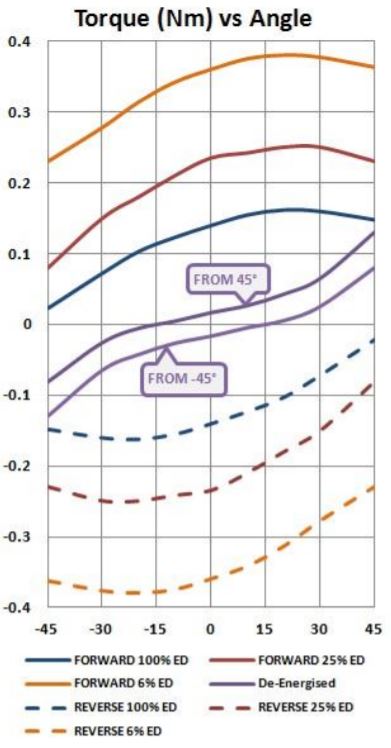
Referring to the image and graph, the device is drawn in the midposition (90° on graph), torque in the de-energised condition is represented by the black curve and arrows. Without stops, the device will try to turn towards stable equilibrium points (where two arrow heads meet) located at 0° and at 180°, and away from unstable equilibrium points (represented as a black dot) located at 90° and at 270°.
In the forward energised state, the device tries to turn towards a single stable equilibrium point at 180°, in the reverse energised state it tries to turn towards a single stable equilibrium point at 0°.
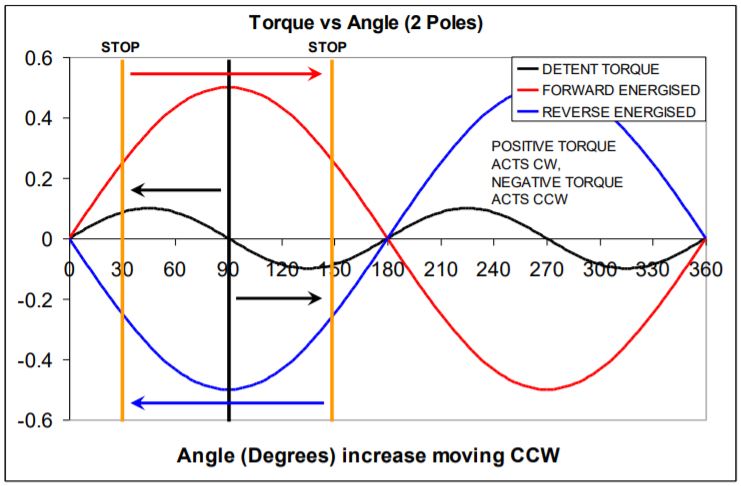 Bistable rotary solenoids do not normally incorporate end stops within the device, a stop should be incorporated externally in the customer application. The stop positions are represented as vertical orange lines in the graph.
Bistable rotary solenoids do not normally incorporate end stops within the device, a stop should be incorporated externally in the customer application. The stop positions are represented as vertical orange lines in the graph.
The mechanical end stops restrict rotation so the device cannot turn all the way to the equilibrium points (which are zero torque points), they should restrict motion to a region where developed torque is sufficient to turn the load at required speed, or to hold the load. For more efficient operation, shape of the torque curves may be modified to optimise behaviour for a particular rotation angle.
Subjectively, the torque behaviour may more easily be understood by considering the analogy of a surface down which a ball bearing is rolled. The surfaces representing the different excitation states of the solenoid are illustrated below, in the case of a 2-pole device this would represent 180° of movement. • The de-energised state is represented by the black surface, the ball-bearing will try to roll towards either end-position. As it is moved further from the end position, the force trying to restore it will initially increase, but will then reduce as it approaches the mid-position. This is an unstable equilibrium point where no force is developed, however if displaced to either side it will roll away from this point towards the end position.
• The de-energised state is represented by the black surface, the ball-bearing will try to roll towards either end-position. As it is moved further from the end position, the force trying to restore it will initially increase, but will then reduce as it approaches the mid-position. This is an unstable equilibrium point where no force is developed, however if displaced to either side it will roll away from this point towards the end position.
• The Forward energised condition is represented by the red surface, the ball-bearing will try to roll to the right. The end positions are zero-force points, the force moving it rightwards will be a maximum somewhere close to the mid-position.
• The Reverse energised condition is represented by the blue surface, this is a mirror image of the red surface, the ball-bearing will try to roll to the left.
(Continued below video)
Installation and Use
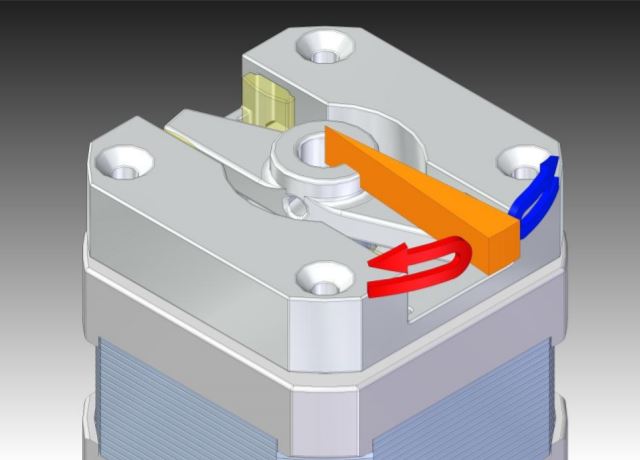
The illustration shows a BRS5045 rotary solenoid in it’s mid-position. The solenoid has a stop fitted (the green part mounted on the shaft, and red part mounted to the body of the solenoid) which limits the range of movement to 30°, 15° to either side of the mid-position (shown in this position).
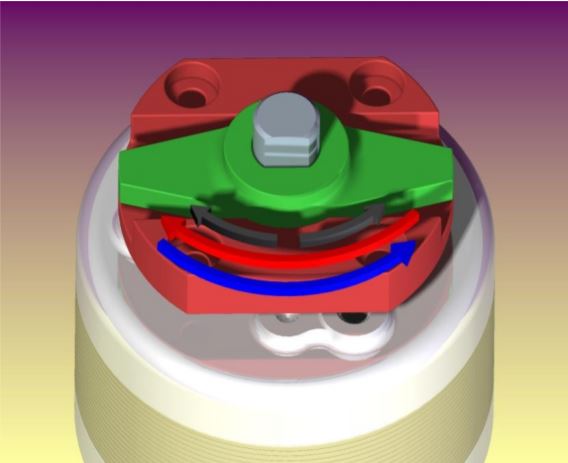
Without any power applied, this is an unstable position, if the shaft is turned in either direction from this mid-position, the residual torque will drive the solenoid further away from the mid position until it comes to rest against the end-stop. This is represented by the black arrows.
A pulse of electrical power applied in the forward direction, will cause the solenoid to develop torque acting in the clockwise direction, and to turn in this sense until it comes to rest against the stop. This excitation condition is represented by the red arrow. If power is then removed the detent torque will cause the solenoid to remain in this position.
A pulse of electrical power applied in the reverse direction, will cause the solenoid to develop torque acting in the counter-clockwise direction, and to turn in this sense until it comes to rest against the stop. This excitation condition is represented by the blue arrow. If power is then removed the detent torque will cause the solenoid to remain in this position.
• For bistable operation it is important that the solenoid is mounted so that the mid-position (parts are normally drawn in this position) is located mid-way between the end stops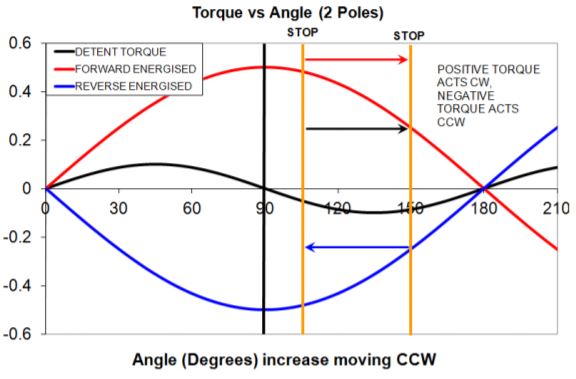 • End stops are normally required to be fitted by the customer. These devices are not normally supplied with internal stops, although these may be offered as an option for some models
• End stops are normally required to be fitted by the customer. These devices are not normally supplied with internal stops, although these may be offered as an option for some models
• Without end-stops to limit rotation of the solenoid, it will naturally try to turn into a magnetic detent position, these positions are zero-torque positions, the solenoid will develop little or no torque if energised in these positions.
• If both end stops are positioned to the same side of the mid-position, a ‘fail-safe’ design can be realised. As shown in the graph, in the case of power failure, the detent torque will drive the device clockwise, it can be energised with forward excitation to drive more quickly to this position. The device must be energised in the reverse direction to drive to the CCW position, and must be kept energised to hold in this position.
Behaviour About the Mid Position
The mid position in which bistable solenoids are normally drawn is the nominal centre half-way position between two (stable equilibrium in de-energised state) end points. This position is defined in relation to a locating feature (typically a flat or keyway) on the shaft of the solenoid, and to mounting features on the body of the solenoid.
In practical terms, the magnetic rotor of the solenoid may not be perfectly aligned in relation to the mid position, the centre of the magnetic operation of the solenoid will be referred to as the neutral position. In manufacture of these devices, it is normally expected that the neutral position should be aligned within +/-5° of the mid position.
If the solenoid in the de-energised condition is pushed from one end towards the other, it can usually be pushed through the mid-position until it reaches a point where it ‘flips’ towards the other end position. If this is done in both directions, the point half-way between these two ‘flipping’ points is the neutral position. There may be a region around the neutral position where the rotor will ‘stick’ with zero torque if forced to this position. Caution should be exercised in making judgements on this behaviour as the position of the ‘flipping’ points may be influenced by the excitation history of the solenoid.
When the solenoid is driven by electrical excitation to it’s end position, the magnetic field induced in the iron may leave some residual field when the excitation is turned off. This remanence will help hold the solenoid in a ‘preferred’ stable end position. If the solenoid is deflected from this preferred position through a small angle towards the neutral position, and then released, the solenoid will return towards the preferred position. If this is repeated with increasing angle, then eventually a point will be established from which the solenoid will not return to the preferred position. Because of the remanence, this point may be beyond the neutral position, and this position may vary depending on the magnitude of excitation current. If an excitation with the opposite polarity is then applied to drive the solenoid to the other end position, then a similar point can be determined in the opposite direction.
The angle between these points is the Minimum Stable Angle of the solenoid under applied excitation conditions. If these points occur before the neutral position (as represented by arrows in drawing) then the Minimum Stable Angle is positive, if these points occur beyond the neutral position it is negative. It may vary under different excitation conditions, and it is expected to become smaller (more negative) as the excitation (and magnetic flux) when the solenoid reaches end position increases.
The smallest angle over which the solenoid can be used reliably will be determined by the sum of the Minimum Stable Angle, and the range of variation between mid and neutral positions.

Torque Data
Torque data is measured statically, the solenoid is mounted to a rotary table with a torque arm acting against a load cell to measure torque. To obtain stable data, response time is measured with the part energised from a regulated current source.
Current regulation stabilises the response time of the solenoid against variations in supply voltage or operating temperature. The solenoid is energised with specified current condition, and is rotated whilst monitoring torque output to derive the torque curves. The torque is measured turning in either direction, and the lower of the two measured values taken for data to allow for hysteresis (a combination of mechanical friction and magnetic hysteresis)
A typical torque characteristic is shown, the graph illustrating this shows torque in both the forward energised (+ve torque acting CW), and reverse energised (-ve torque acting CCW) states. The behaviour in either direction is symmetrical, so is only normally shown for the forward energised condition.
There are two curves representing torque in the de-energised condition. Due to magnetic hysteresis, after the solenoid is driven to either end position, there will be some residual magnetism in the steel which causes the solenoid to favour this end position even moving slightly beyond the centre position towards the other end – this phenomenon aids stability of bistable operation.
Response Time Data
To obtain stable data, response time is measured with the part energised from a regulated current source with a current of 80% of the nominal value (the current drawn by the solenoid in the cold 20°C condition when the stated voltage is applied). Current regulation stabilises the response time of the solenoid against variations in supply voltage or operating temperature. The stated voltage in response speed data is the source voltage from which the current regulator works. The measured performance corresponds to the behaviour that will be achieved with excitation at the nominal voltage when the coil temperature is elevated to approximately 80°C. It should be noted that the source voltage influences the rise-time of the current to reach rated value – a high source voltage will enable shorter electrical rise time and faster actuation times.

End stops are positioned equidistant either side of the mid-position of the solenoid under test.
In addition to the moment of inertia of the shaft and stop configuration of the test rig, additional masses may be mounted to the shaft to measure response time under different load conditions.
A resistor of low ohmic value relative to the coil resistance of the device under test is installed in series with the coil, and voltage across this (corresponding to the coil excitation current) is measured with an oscilloscope.
In most cases a potentiometer is mounted to the test rig with a constant voltage applied across the end terminals, the potential measured on the wiper of the potentiometer (corresponding to position) is displayed on another channel of the oscilloscope (this may be omitted for very small devices where friction in the potentiometer has a significant impact on response speed of the device)
When the device is energised, the current waveform will show an exponential curve as current rises, and will show a ‘spike’ in this curve as the rotor of the actuator impacts the end stop and bounces. Response time data is usually given in the form of a graph plotting response time against load inertia, with several lines representing different rotation angle and excitation conditions.
The response time is taken to be the time taken from application of power to the solenoid, until the assembly first contacts the end-stop at limit of rotation, this is judged as the point where the assembly is seen to start decelerating. This does not include time taken for the device to settle and for any rebound to die down, as the end-stop conditions will vary with customer implementation and are not under Geeplus control.
 Electrical Drive
Electrical Drive
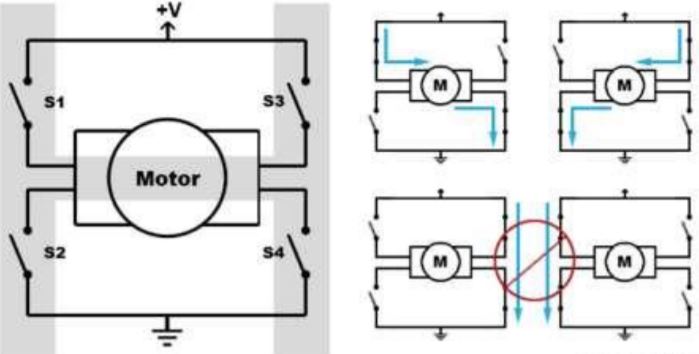
To drive a bistable rotary solenoid, a circuit configuration known as an H-Bridge is normally required. This is shown schematically. This is normally implemented using solid state switches (transistors), a number of integrated devices are available to simplify implementation of such a circuit.
By closing either S1 and S4, or S2 and S3 while the other switches are open, the current can be caused to flow through the solenoid coil in either the forward or the reverse direction. With momentary excitation pulses as depicted in the timing diagram the solenoid can be driven CW or CCW, remaining in either position with no power applied in between.
Response Speed Testing with Customer Diverter
As a chargeable service, if a diverter gate and end-stop are supplied with appropriate mounting features to mount on Geeplus test fixtures, we can undertake a series of response tests for a solenoid with user supplied load mounted, with results supplied as an oscillogram showing position vs time. Mechanical mounting features should be as below. For test purposes parts can be energised with supply voltage in the range 0v-60v, current in the range 0A-10A.

![]()
+44(0)208 6567788
Geeplus Europe
Worldwide Customer Service
+1 803 549 6422
Geeplus Inc.
South Carolina (USA)
+81 45 662 9705
Geeplus Asia
Yokohama, Japan
Contact Geeplus
We're here to help - Contact Geeplus today!
Follow us on Social Media
Next Generation Motion Control Solutions!
Geeplus Headquarters:
Triple Two Centre, Tannery Close Beckenham, BR3 4BY, UK
©Geeplus Holdings 2019, All Rights Reserved
Privacy Policy
![]() Offices in Europe | USA | Asia
Offices in Europe | USA | Asia